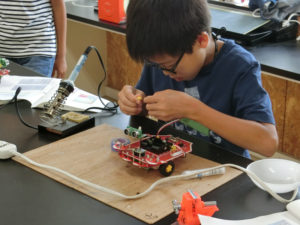
基本コースでは、ロボット(TJ3-B)にWhile(ホワイル)のプログラミングを使い、繰り返し動作をさせるジグザクやスラロームに進むプログラム(指令)を作成しました。 応用コースでは、昨年までロボット「方位センサー」を取り付けていましたが、今年からは「超音波センサー」の取り付けに変更しました。自分のロボットにセンサーを取り付けるため、基板に細かい部品を半田づけを行い、ロボットをバージョンアップしました。 共有: X で共有 (新しいウィンドウで開きます) X Facebook で共有 (新しいウィンドウで開きます) Facebook この投稿に関連する投稿 FacebookXBlueskyCopy