ロボットコースでの活動報告を順次掲載してまいります。
ロボットコース 令和7年度1月(第8回)
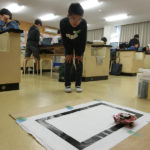
発明クラブ ロボットコースの第8回目です。 基本コースでは、アナログ信号によるライントレース走行です。 アナログ信号を使用してラインレースのプログラム作成をします。来月のタイムトライアル競技会に向けて早くゴールす […]
- カテゴリー
- ロボットコース
ロボットコース 令和7年度12月(第7回)
発明クラブ ロボットコースの第7回目です。 基本コースでは、液晶表示器とアナログ信号モニターです。 液晶表示器を基板へ取り付けてプログラムの拡張機能を追加します。はんだごてに細心の注意を払ってとりつけましょう。 […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度11月(第6回)
発明クラブ ロボットコースの第6回目です。 基本コースでは、デジタルスイッチ信号によるライントレース走行です。 ロボカーにタッチセンサー&ラインセンサーをプログラムし、先月はスイッチ記号を利用して停止、方向転換等の […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度10月(第5回)
発明クラブ ロボットコースの第5回目です。 基本コースでは、ロボットプログラム作成です。 ロボカーにタッチセンサー&ラインセンサーをプログラムし実践しました。テスト走行で子ども達も笑顔が見られました。実際に動かして […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度9月(第4回)
発明クラブ ロボットコースの第4回目です。 基本コースでは、ロボットプログラム作成です。 マイクロビットでロボカーの基本走行をプログラムします。 関数化という方法で、モーターコントロールのプログラムを簡便に作成する […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度7月(第3回)
発明クラブ ロボットコースの第3回目です。 基本コースでは、制御基板の製作です。 基板に電子部品を細心の注意を払って半田付けし、完成させます。 LEDランプが点灯できれば成功です!基板にコネクターとマイクロビットを […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度6月(第2回)
発明クラブ ロボットコースの第2回目です。 基本コースでは、ロボットのマイクロビット、Make Code(メイクコード)操作をしました。 ・マイクロビットとは? マイクロビットは、小型コンピュータであり、ロボカーに […]
- カテゴリー
- ロボットコース

ロボットコース 令和7年度5月(第1回)
新年度第1回目の発明クラブ ロボットコースが始まりました。 基本コースでは、ロボットのボディ作成に取り組み、各部品の名称や役割、使用する工具の使い方について学びました。 応用コースでは、サッカー競技で用いる自分のロ […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度2月(第9回)
ロボットコースの最終回では、基本クラスはタイムトライアル競技、応用クラスは障害物競技を開催しました。 子どもたちはこれまでに学んだ知識と技術を活かし、工夫を凝らして臨み、最後まで粘り強く取り組む姿勢が印象的でした。 […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度1月(第8回)
ロボットコースの基本コースでは、アナログ制御のプログラムを作成し、来月のタイムトライアル競技会の説明を行いました。 応用コースでは、障害物競技にチャレンジするため、ゴール判定や障害物回避のプログラムをおさらいしました […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度12月(第7回)
ロボットコースの基本クラスでは、液晶表示器を取り付け、表示のプログラムについて学びました。また、拡張機能プログラムに取り組みました。 応用クラスでは、ライントレースのおさらいを行い、3点のライントレース […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度11月(第6回)
ロボットコースの基本クラスでは、デジタルスイッチ信号によるライントレース走行について学びました。左右2つのセンサーを使ったプログラムに挑戦です。また、無事に全員がロボットを完成させることができました! […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度10月(第5回)
ロボットコースの基本クラスでは、壁や白黒ラインの検知センサーについて学び、取り付けを行い、課題のプログラムに挑戦しました。 応用クラスでは、ドローンのプログラミングに挑戦しました。自分でプログラムを組み立て、思い通り […]
- カテゴリー
- ロボットコース

ロボットコース 令和6年度9月(第4回)
ロボットコースの基本クラスでは、モーター制御のプログラミングを行いました。スタート位置から目的地で止まるプログラムを組み立てたり、回転の動作に挑戦しました。 応用クラスでは、マイクロビットを使ったプログラミングに挑戦 […]
- カテゴリー
- ロボットコース
ロボットコース 令和6年度7月(第3回)
ロボットコースの基本クラスでは、とうとうロボットの組み立てを本格的に取り組みました!はんだ付けをはじめとした電子部品の組み立てに集中して取り組みました。作業量が多く大変でしたが、残りも頑張って完成させましょう。 応用 […]
- カテゴリー
- ロボットコース
令和4年度
7月(第3回)

基本クラスでは、ロボット(TJ3-B)にWhile(ホワイル)のプログラミングを使い、繰り返し動作をさせるジグザクやスラロームに進むプログラム(指令)を作成しました。

応用クラスでは、先月に作成したサッカープログラムによるサッカー競技会を開催しました。競技会はクラブ員の活気や熱気に溢れる熱戦となりました。
惜しくも敗れたクラブ員は、2月に開催する「障害物コースのタイムトライアル競技会」で優勝できるようにぜひリベンジしてください!!
6月(第2回)

基本クラスでは、ロボット(TJ3-B)をパソコンで入力したプログラミングの指示通りに動かすため、モーター制御のプログラムを作成しました。

応用クラスでは、7月に行うロボットによるサッカー競技会のため、サッカープログラムを作成しました。
来月のサッカー競技会で勝利するため、試行錯誤しながら何度もプログラムを修正し、チャレンジしていました。
5月(第1回)
ゴールデンウィーク最終日がロボットコース最初の活動となりましたが、クラブ員みんなが参加してくれました。



基本クラスでは、ロボットコース(基本・応用)で2年間使う自律型ロボット(TJ3-B)を組み立てました。長時間の細かい作業を頑張って取り組みました。



応用クラスでは、昨年度は新型コロナウイルス感染症の影響により活動が短く、製作できなかった超音波センサーを今年度は製作し、取り付けました。
令和3年度
3月(第4回・第5回)
新型コロナウイルス感染症における「まん延防止等重点措置」により2月から延期となっていた活動を3/27(日)午前・午後に分けて、第4回・第5回を実施しました。今年度は半年間の活動でしたが子ども達の頑張りで、最後にはロボットコースの競技会を開催しました。
基本コースは、「迷路コース タイムトライアル競技会」を開催しました。
優勝:佐藤 あおい 準優勝:橋本 紗由 プログラミング賞:岡本 颯真
応用コースで、ロボットコース2年間(基本・応用)で培った知識・技術などを駆使した「レスキュー競技会」を開催しました。

優勝:渡邊 晴葵 準優勝:要垣内 奏多 プログラミング賞:島田 晶
1月(第3回)

基本コースでは、While文とIf文を使用したプログラムによりタッチセンサーを使い、ロボット(TJ3-B)が障害物を見つけ、ロボットの後退や障害物を回避する条件文のブログラムを作成しました。

応用コースでは、応用コースでは、2年間に亘るロボットコース(基本・応用)も大詰めとなり、障害物の回避やゴールなどを識別する障害物プログラムを作成しました。
12月(第2回)

基本コースでは、ロボット(TJ3-B)をジグザクやスラロームに進むプログラムを作成しました。ロボットごとに数値が異なるため、クラブ員が数値を何度も微調整しながらプログラムしました。

応用コースでは、新型コロナウイルスの感染拡大のため、2年前に実施できなかった基本コースのタイムトライアル(迷路コース走行)競技会を実施しました。
11月(第1回)
新型コロナウイルス感染症の影響により発明クラブの活動場所である環境学習センター(西春中学校内)が使用できないため、今年度は名古屋芸術大学アートスクエア(文化勤労会館)で発明クラブの活動を実施します。


基本コースでは、ロボットコース(基本・応用)で2年間使う自律型ロボット(TJ3-B)をひさしぶりに使う工具での組み立て、できあがったロボットの動作確認を行いました。


応用コースでは、1年半ぶりロボット(TJ3-B)を操作するため、3点ライントレースなどのプログラミングを復習しました。
令和元年度
5月(第1回)
平成から令和に改元した今年度の発明クラブとして「ものづくりコース」、「ロボットコース」、「自由製作コース」を通じて、初めての活動日でした。

基本コースでは、ロボットコース(基本・応用)で2年間使う自律型ロボット(TJ3-B)の組み立てを行いました。細かい作業ばかりで、みんな四苦八苦しながら一生懸命取り組んでいました。

応用コースでは、いつも行っているロボット(TJ3-B)のプログラミングではなくスクラッチ (プログラミング言語)を行いました。
昨年の基本コースで学んだプログラミングとはまた違った体験で、プログラムの新たな発見となったようです!
平成30年度
12月(第7回)


基本コースでは、基盤にセンサー等の部品を半田づけし、ラインセンサーを製作しました。
このラインセンサーをロボット(TJ3-B)に取り付けることで、黒と白のラインを判別することが可能となりました。


また、活動日前日の12/8(土)には基本コースのクラブ員(自由参加)は、本クラブでも使用しているロボット(TJ3-B)を使用した国際大会「ロボカップジュニア」東海ブロック大会(会場:愛工大明電高等学校 淳和記念館)を見学しました。
応用コースでは、昨年の基本コースでライントレースの復習を含め、1点・2点・3点ライントレースのプログラムを作成し、それぞれの場合分けについて再度学び直しました。
11月(第6回)

基本コースでは、while文やif文などを使い、タイマー、変数やLED点灯のプログラムを作成しました。

応用コースでは、7月に取り付けた「超音波距離センサー」やCコード、変数を使ったプログラムを作成しました。
10月(第5回)

基本コースでは、ラインセンサーを使い、ロボット(TJ3-B)がトレース走行する条件文のブログラムを作成しました。

応用コースでは、先月に作成したサッカープログラムによるサッカー競技会を開催しました。参加したクラブ員の熱気や活気で白熱した競技会となりました。
惜しくも敗れたクラブ員は、3月に開催する「レスキュー競技会」で優勝できるようにぜひリベンジしてください!!
9月(第4回)

基本コースでは、If文などのプログラムによりタッチセンサーを使い、ロボット(TJ3-B)が障害物を見つけ、ロボットの後退や障害物を回避する条件文のブログラムを作成しました。

応用コースでは、10月に行うロボットのサッカー競技会のため、サッカープログラムを作成しました。来月のサッカー競技会で勝利するため、試行錯誤しながら何度もプログラムを修正し、チャレンジしていました。
7月(第3回)

基本コースでは、ロボット(TJ3-B)にWhile(ホワイル)のプログラミングを使い、繰り返し動作をさせるジグザクやスラロームに進むプログラム(指令)を作成しました。

応用コースでは、昨年までロボット「方位センサー」を取り付けていましたが、今年からは「超音波センサー」の取り付けに変更しました。
自分のロボットにセンサーを取り付けるため、基板に細かい部品を半田づけを行い、ロボットをバージョンアップしました。
6月(第2回)

基本コースでは、ロボット(TJ3-B)をパソコンで入力したプログラミングの指示通りに動かすため、モーター制御のプログラムを作成しました。
応用コースでは、先月のスクラッチ(プログラミング言語)に引き続き、スクラッチの応用編を行いました。
5月(第1回)
今年度の発明クラブとしての「ものづくりコース」、「ロボットコース」、「自由製作コース」を通じて、初めての活動日でした。

基本コースでは、ロボットコース(基本・応用)で2年間使う自律型ロボット(TJ3-B)の組み立てを行いました。

応用コースでは、ロボット(TJ3-B)のプログラミングではなくスクラッチ (プログラミング言語)を行いました。
昨年の基本コースで学んだプログラミングとは違う体験をして、プログラムの新たな発見をできたかな!?
平成29年度
3月(最終回)
最終回の今月は、ロボットコース1年間の総決算として競技会を開催しました。
基本コースは、「迷路コース タイムトライアル競技会」を開催しました。
【午前の部】
優勝:水野 航暉 準優勝:遠藤 颯人 3位:渡辺 隼大 プログラミング賞:谷口 遥人
【午後の部】
優勝:田中 悠太朗 準優勝:加賀谷 陸 3位:有賀 庵 プログラミング賞:成田 怜平
応用コースで、ロボットコース2年間(基本・応用)で培った知識・技術などを駆使した「レスキュー競技会」を開催しました。
優勝:滝本 瀬奈 準優勝:林 大二郎 3位:山下 晴生 プログラミング賞:佐々木 皓基
2月(第9回)


基本コース・応用コースで、来月(3月)の最後の活動となる競技会に向け、最後のプログラムを作成しました。
クラブ員一人ひとりがロボット(TJ3-B)のプログラムを確認・改良し、優勝を目指し、最終準備・調整を行いました。
1月(第8回)

基本コースでは、基盤にセンサー等の部品を半田付けし、ラインセンサーを製作しました。
このラインセンサーをロボット(TJ3-B)に取り付けることで、黒と白のラインを判別することが可能となります。

応用コースでは、障害物の回避やゴールなどを識別するために、プログラムの追加・改良を行いました。
2年間に亘るロボットコース(基本・応用)もいよいよ大詰めとなり、来月は3月に開催する競技会に向け、最終準備をしていきます。
12月(第7回)
基本コースでは、発明クラブで使用しているロボット(TJ3-B)を使用した国際大会「ロボカップジュニア」東海大会(会場:愛工大明電高等学校 淳和記念館)を見学しました。
クラブ員も競技中の様子などを真剣に見学しており、いつか北名古屋市のクラブ員もこの大会に出場してくれることを待ち望んでいます。

応用コースでは、ライントレースの復習を行いました。1点・2点・3点とライントレースを増やし、複雑かつ地道にプログラムを作成し、それぞれのライントレースの違いを比べていました。
11月(第6回)

基本コースでは、ロボット(TJ3-B)にタイマーや変数を使い、トレース走行中のLEDを点灯させるブログラムを作成しました。

応用コースでは、9・10月に行ったスクラッチ (プログラミング言語)からロボット(TJ3-B)に戻ってきました。
最初は、久しぶりのロボットのプログラムのため、若干戸惑うクラブ員もいましたが、すぐに思い出し、ロボット(TJ3-B)に方位センサーを取り付け、プログラムを作成しました。
10月(第5回)

基本コースでは、ロボット(TJ3-B)がラインセンサーを使ったトレース走行する条件文のブログラムを作成しました。

応用コースでは、先月に引き続きスクラッチ (プログラミング言語)を行いました。
ロボットコース2年目であるクラブ員(応用)だけあって、違うプログラミングでもみんなの理解力は目を見張るもので、「素晴らしい」の一言でした!
9月(第4回)

基本コースでは、ロボット(TJ3-B)がタッチセンサーを使った障害物を見つけ、回避する条件文のブログラムを作成しました。
While文やIf文を使用し、タッチセンサーをONにすることでロボット(TJ3-B)が後退したりして、障害物を避けることができます。

応用コースでは、ロボット(TJ3-B)のプログラミングではなくスクラッチ (プログラミング言語)を行いました。
いつもと違ったプログラミング体験は楽しかったかな??
7月(第3回)
基本コースでは、ロボット(TJ3-B)をジグザクやスラロームに進むプログラム(指令)を作成しました。While(ホワイル)は、繰り返し動作をさせる命令だったよね。忘れないでね!

応用コースでは、サッカー競技会開催、豪華?賞品があったためなのか? 競技会場はものすごい熱気と活気で白熱した戦いが繰り広げられました。おしくも優勝を逃した君! フリー(Free)教室でサッカープログラムをもっと改造して、お友達と対戦してみませんか?
6月(第2回)

基本コースでは、ロボット(TJ3-B)を指令通り動かすためパソコンでモーター制御のプログラムを作成しました。

応用コースでは、7月に行うロボットのサッカー競技会のため、サッカープログラムを作成しました。
5月(第1回)
「ものづくりコース」「ロボットコース」を通じて、発明クラブとして今年度、初めての活動日でした。

基本コースでは、2年間使う自律型ロボット(TJ3-B)の組み立てを行いました。

応用コースでは、昨年から使っている自分のロボットに方位センターの取り付けるため、基板に部品を半田づけする細かい作業を行い、バージョンアップしました。